Prop Test - 10" Multirotor Props
From ItsQv
![]()
August 2012
Contents |

|
| Props! |
Introduction
- Propellers, especially in a multirotor application are something of a mystery to most folks. There is nothing available to tell a person exactly which prop to use for each application and so we all end up buying several to flight test based on recommendations from friends, forum threads, etc.
- Then there are the calculators like Moto-Calc and eCalc (my favorite) which seem like they do a good job but never actually match what we experience or measure. To some this is maddening and frustrating because it seems it should be easy cause it's just math, right?. Welcome to the world of compressible fluid dynamics my friends :)
- My goal in this bit of testing then is to provide a little more information, hopefully without too much confusing terms or high level math so that everyone can get a little better idea about what is going on with their particular prop selection.
Reality Check!
- Before I get started with the testing part I would like to bring up the fact that what you see here is simply one set of results from low cost static testing and measuring equipment. There are no guarantees here with one exception: your results will vary. This is due to the fact that a multi-rotor in flight is a very dynamic system so static measurements can only go so far. At best, these results are comparative. That is,you can get an idea of which prop might work better in your particular application but the numbers themselves should be viewed as reference and not exact quantities you will find. So, on with the testing!
Test Set Ups
Props
- All props are cleaned of mold flashing, balanced on a mag balancer and checked for tip tracking error. Tracking error is adjusted if it is within 1.5mm (.060") initially. In some cases it is warped or poorly manufactured to the degree I can't adjust it so I buy more.
Motor
- The motor used for this series of tests was a new Exceed 3010/910Kv. This is much larger than any motor that would normally drive these props and this is to get test results that reflect more about the prop and less about the motor.
ESC
- The ESC I used is a Castle Creations Ice 50. These are nice because they have a lot of adjustment latitude for motor parameters and their built in data logger is a good source for validating the data I get off the Medusa Power Analyzer I use to collect data.
Bench Test Unit
- I built my first bench tester based on a thread in RCGroups by Dr Kiwi in 2008 and the third iteration of that is what I use today.
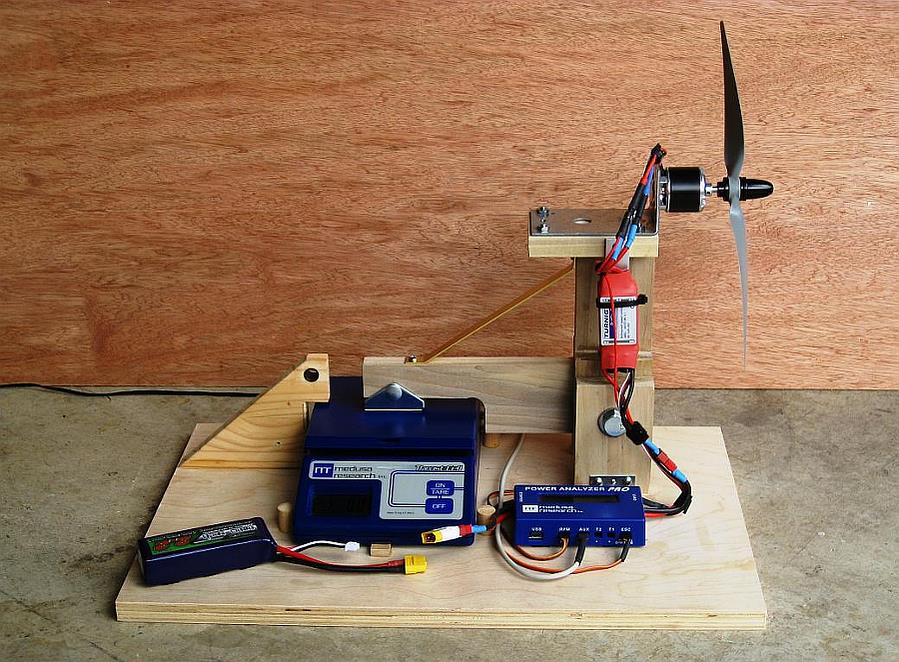
|
| It's a pusher test unit (yes the prop is backwards!) Click image to see the write up for this |
- The system I use for data collection was produced by Medusa Research and, unfortunately, is no longer available. It works quite well and gives repeatable stable results. If you can find one, they are an easy way to get started in this nerdy part of our hobby!
The Contenders
- Here is the basic information on the 12 propellers I selected for this test.
| Propeller list and basic information |

|
| *Stiffness is a relative measure with 1 being very flexible and 5 being very stiff |
What's Different About this Series of Tests?
- I've published results before and have always thought a simple view of one set of static results would tell the story, performance wise, of how these propellers measure up to one another. Turns out there is more to see if you look a little deeper both empirically and mathematically.
- With that said, the difference from earlier tests is I will use some graphical views of the collected data as well as some improvements in the stability of the load cell I'm using to collect the thrust values.
The Graphs
- Previously I showed one or two simple charts with the numbers collected and I highlighted some of the best results. The following graphs I think will do a better job of showing how these all measure up.
Power Required to Make 500gr Thrust
- In this first graph you see a simple bar chart identifying how each prop did. I picked this 500gr (17.6oz) value because my quad weighs nearly 2kg fully loaded. If you look at this you might immediately think the DJI 10x3.8 prop is the winner.

|
Maximum Grams Thrust per Watt
- In this next graph you see the typical grams thrust per watt measure found in many prop charts. This is often referred to as propeller efficiency and it is related to efficiency, just not the whole efficiency story. Efficiency is basically Power in divided by Power out. Notice how some of the props are quite different in terms of how they "Rank" compared to the others. This measure is not a constant and it changes with many factors like RPM, air temperature and density, etc.

|
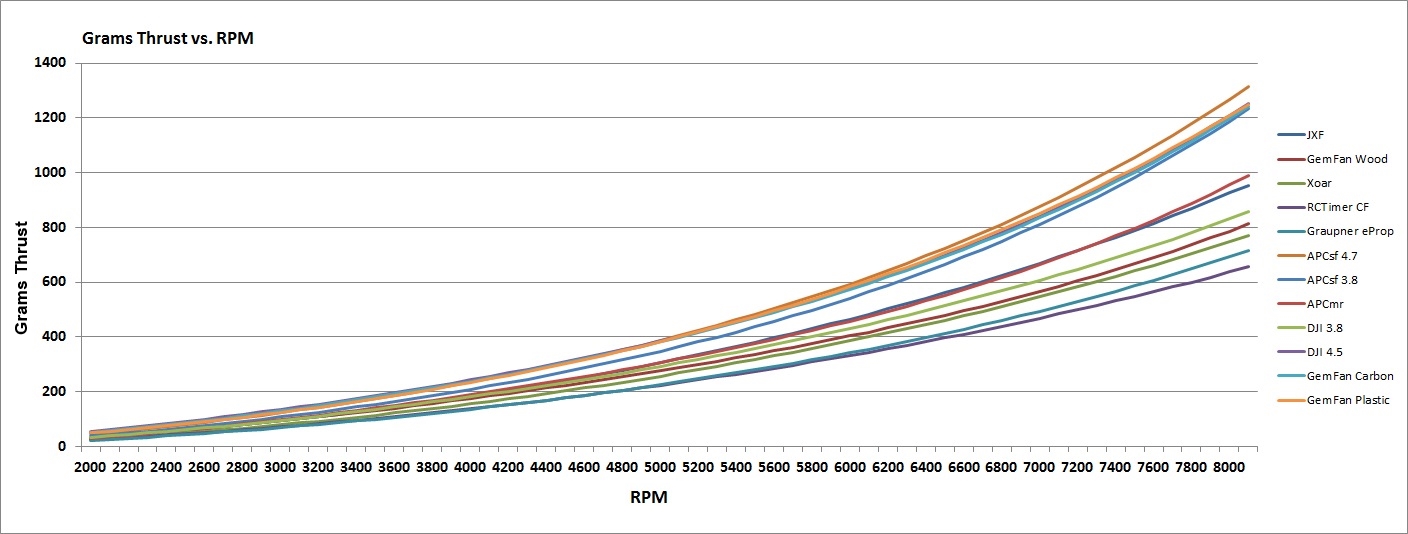
Thrust vs. RPM
- In graph number three I have plotted the propeller curve for Thrust vs. RPM. All 12 props were tested in one evening and in both CW and CCW directions. The plotted curves are generated using a polynomial fit tool to each pair of data. It's interesting to note that in general the softer props have a higher end value than the stiffer props.
|
| Click image to enlarge, back button to return |
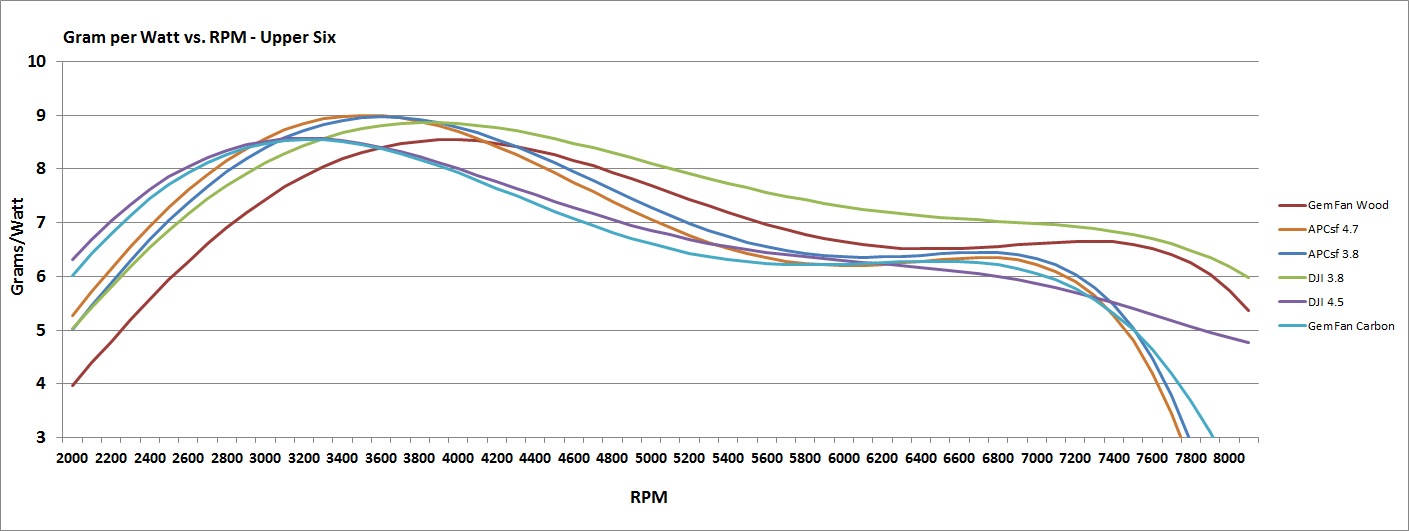
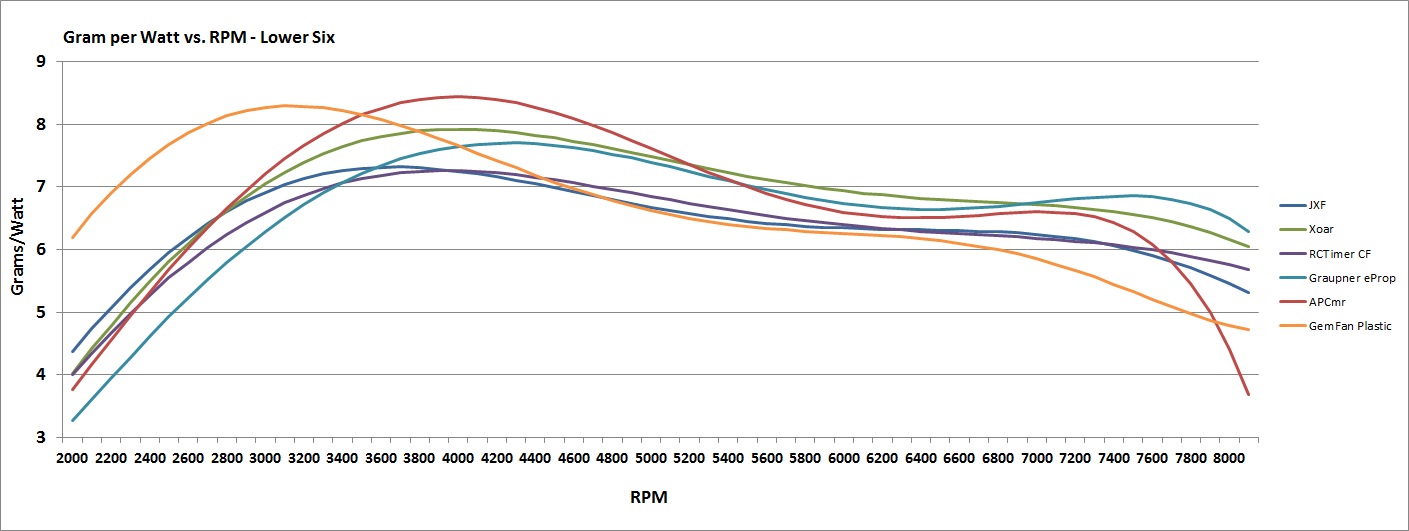
Grams per Watt vs. RPM
- The last pair of graphs which were split into two for readability, get interesting and have some surprises. They show the common gram-per-watt measure plotted against RPM and the differences are striking in both shape and where the maximum values lie. From this you can see which prop should give you the highest gr/watt value as well as the widest rpm range for those values. With a little study you can extrapolate what the optimum weight would be for your multirotor to get the most air-time.
- The real story here though is how poorly my two favorite props seemed to have measured up!
|
| Click image to enlarge, back button to return |
|
| Click image to enlarge, back button to return |
Opinion
Here's my take on the top six:
- The DJI 10x3.8 & 10x4.5 - It is easy to see the new DJI 10x3.8 may be a real winner. It is a very soft (flexible) prop, however, so the jury is out on how it flys and whether or not it can be balanced and vibe free for AP. Notice that both these props have a very flat curve giving them the ability to keep a high gr/watt value for a wide RPM range.
- The APCsf 10x3.8 & 10x4.7 props - These always test well, they are tough and easy to balance. Too noisy for my taste but great for backups. Notice how they drop off much more quickly than the DJI props. This will make them more sensitive to higher weight in terms of flight time. They are OK for AP however they do get noisy when pushed and can cause some jello even when balanced.
- The GemFan 10x4 woody - These tested about where I expected. They make good thrust but they burn a lot of watts doing it. The tip tracking on these is terrible, in fact I had to go through (buy!) eight props to find two to test. For a woody, they are very buzy and not a great choice for AP.
- The GemFan 10x4.5 Carbon/Plastic - Surprise! While it is a surprise how well this and the plastic version measured, they are still pretty low quality. The tip tracking is horrible, they are very noisy and rarely smooth. I found them to be very difficult to balance well.
The rest:
- The GemFan 10x4.5 Plastic - These really are cheaply made. Like the carbon version the tip tracking is horrible and the hubs have a tendency to crack, they too are very noisy and rarely smooth. Great for testing though!
- The Xoar 10x5 - Surprise #2! These are one of my favorite props. They are impeccably made, always tip track near perfectly and are as close to balanced as any I have seen. They fly wonderfully and are smooth as they come. I was very surprised to see where they ended up. (But I will still recommend them :) )
- The APCmr 10x4.5 - This prop is one I will fly soon. The performance tested excellent, on the bench it is quiet, it is much stiffer than the APCsf props and much lighter than the APCe props. Can't wait to try these!
- The Graupner 10x5 eProp - Max Surprise!! This is my favorite flying prop because the response is so good, they balance perfectly and are easy to get jello free. They are also pretty quiet. I was shocked to see how they measured up (down?).
- The JXF 10x5 - These are a Xoar product and are hard to find. They are primarily a Glow engine sport prop and for that they are probably excellent. Really beautifully made and I always include these as a sort of programmed outlier.
- The RCTimer 10x5CF - DO NOT WASTE YOUR MONEY ON THESE PROPS. These came out as a Graupner clone and based on the shape they are nearly identical. They are insanely stiff however and likely this is the reason they test so poorly. I have flown these on two different quads in two sizes, 9" & 10", and found the same result: Gawdawful!
What's Missing
- It would be nice to plot mah per minute to get another piece of the efficiency picture. I don't have a way to do this "on the bench" however and a set of logging ESC's may add many variables into the view so this will take some study.
- What's also missing in all of this is a measure of how they "Feel". That is, are they crisp performers in the air or are they sluggish and slow to respond? I don't have a way to measure this but I would personally rank the ones I have flown using my thumb-o-meter like this:
- 1. Graupner eProp
- 2. Xoar Wood
- 3. APC Slow Fly
- 4. DJI
- I haven't flown the new DJI 3.8 or the APCmr props and I am anxious to try them. The GemFan woody's flew OK but they were serious Jello makers and no amount of balancing or tip tracking adjustment could fix them. The GemFan plastic props flew fine, I just wouldn't use them on a camera or FPV ship due to their inherent weakness and vibration issues.
See Also
- How To - Motor Balancing
- How To - Prop Balancing
- My Test Bench
- Dr Kiwi's Motor Test bench Results
- Dr Kiwi's Thrust Stand Build Thread
Vendors used for this Project
Comments? Questions?